
Dans certaines situations en animation, particulièrement lorsqu’on utilise des quaternions pour gérer les rotations dans Blender, un problème spécifique peut survenir : le « Quaternion Bug ». Ce bug provoque des interpolations inattendues ou des inversions de rotations, en particulier lorsque le système tente de calculer le « chemin le plus court » entre deux orientations quaternions. Ce comportement peut créer des mouvements abrupts ou incorrects dans votre animation.
Pourquoi ce bug se produit-il ?
Les quaternions sont conçus pour éviter le problème du Gimbal Lock et permettre des interpolations fluides entre les rotations. Cependant, un quaternion peut représenter une rotation de deux façons mathématiquement équivalentes, mais opposées :
- Orientation A.
- Orientation B (flippée).
Blender choisit automatiquement l’une de ces représentations pour interpoler entre deux clés. Si le logiciel choisit la mauvaise, cela peut entraîner une interpolation qui semble incorrecte ou inversée, car Blender interprète la rotation comme un « grand cercle » au lieu du chemin le plus court.
Symptômes du bug des quaternions :
- Les os ou objets effectuent des rotations inattendues ou tournent dans la direction opposée à celle prévue.
- Les interpolations entre deux poses semblent exagérées ou incohérentes.
- Cela se produit souvent lorsque l’angle entre les deux quaternions dépasse 180°.
Solution : Utiliser la commande « Flip Quats »
Blender propose une solution rapide pour corriger ce problème : la commande Flip Quats. Cette fonction permet d’inverser l’orientation des quaternions pour garantir une interpolation fluide et correcte.
Étapes pour utiliser Flip Quats :
- Passez en mode Pose :
Sélectionnez l’armature et passez en Pose Mode (Ctrl + Tab). - Sélectionnez l’os concerné :
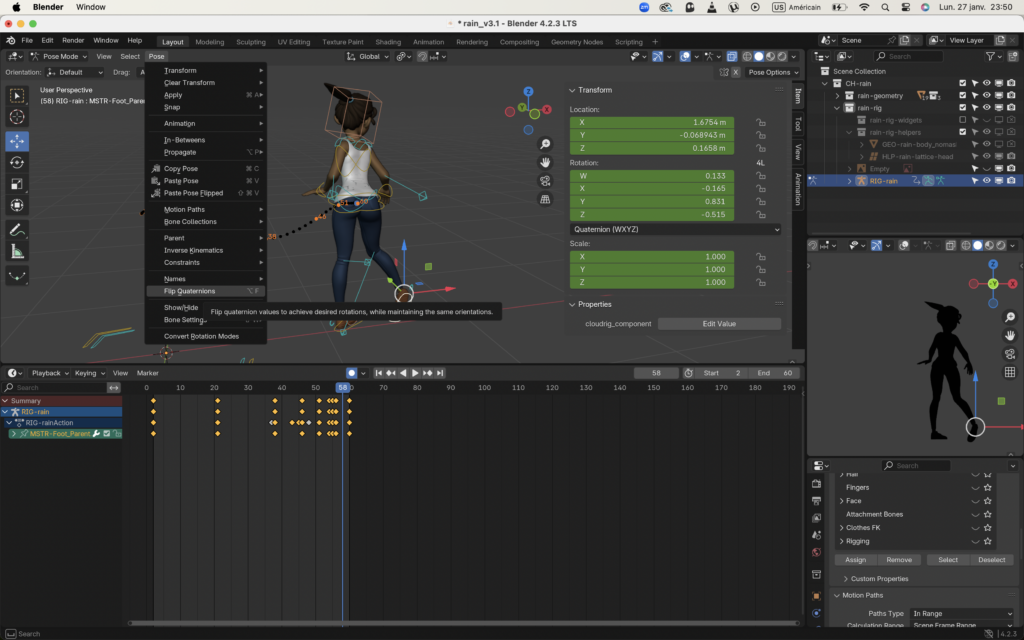
Identifiez l’os qui subit le problème d’interpolation ou de rotation incorrecte. - Accédez au menu Pose :
- Allez dans le menu Pose en haut de la fenêtre Blender.
- Cliquez sur Flip Quats.
- Ou utilisez le raccourci par défaut : Alt + F.
- Vérifiez l’interpolation :
Rejouez votre animation pour vous assurer que la rotation est maintenant fluide et cohérente.
Pourquoi « Flip Quats » fonctionne-t-il ?
Lorsque vous utilisez Flip Quats, Blender bascule l’interprétation de l’orientation quaternion de l’os concerné. Cela corrige l’inversion ou la mauvaise interpolation en forçant Blender à recalculer le chemin entre les deux rotations en suivant une trajectoire plus logique.
Conseils supplémentaires pour éviter les problèmes avec les quaternions :
- Utilisez des clés intermédiaires :
Si une rotation semble problématique, ajoutez une clé intermédiaire pour guider Blender et éviter que l’angle ne dépasse 180°. - Vérifiez vos courbes dans le Graph Editor :
Les courbes W, X, Y et Z des quaternions peuvent être ajustées manuellement si nécessaire. - Combinez FK et IK :
Les rotations complexes, notamment dans les articulations comme les épaules, peuvent bénéficier d’un mélange entre FK et IK pour éviter les interpolations imprécises. - Testez vos poses :
Après avoir créé vos clés, rejouez l’animation pour vérifier que les interpolations fonctionnent comme prévu.
Conclusion
Le bug des quaternions peut être frustrant, mais grâce à la commande Flip Quats (Alt + F), vous avez une solution simple et rapide pour le corriger. Cette astuce vous permettra de préserver la fluidité et la cohérence de vos animations sans devoir reconstruire vos poses.
Besoin d’autres conseils sur les rotations ou les interpolations dans Blender ? N’hésitez pas à demander ! 😊




Je m’appelle Timothée MEYRIEUX, je suis modélisateur 3D et scénariste. Je suis passionné par Blender ! Sur ce blog je partage ma passion et mes connaissances pour que tu puisses apprendre à utiliser Blender 3D pour tes projets !